Какая система управления краном лучше?
Мнение эксперт-менеджера С.Н. Теплова, экс-начальника конструкторского бюро
ООО "СКТБ ПТО им. Е.О. Патона"
Для начала поясню, какие бывают системы управления и в чем их особенности. Итак, самые распространенные системы управления: релейно-контакторная и частотная. Очень редко применяется – тиристорная система управления. В последнее время практически не применяется – дроссельная система управления.
На рисунке 1. Приведена диаграмма, поясняющая особенности работы каждой системы управления.
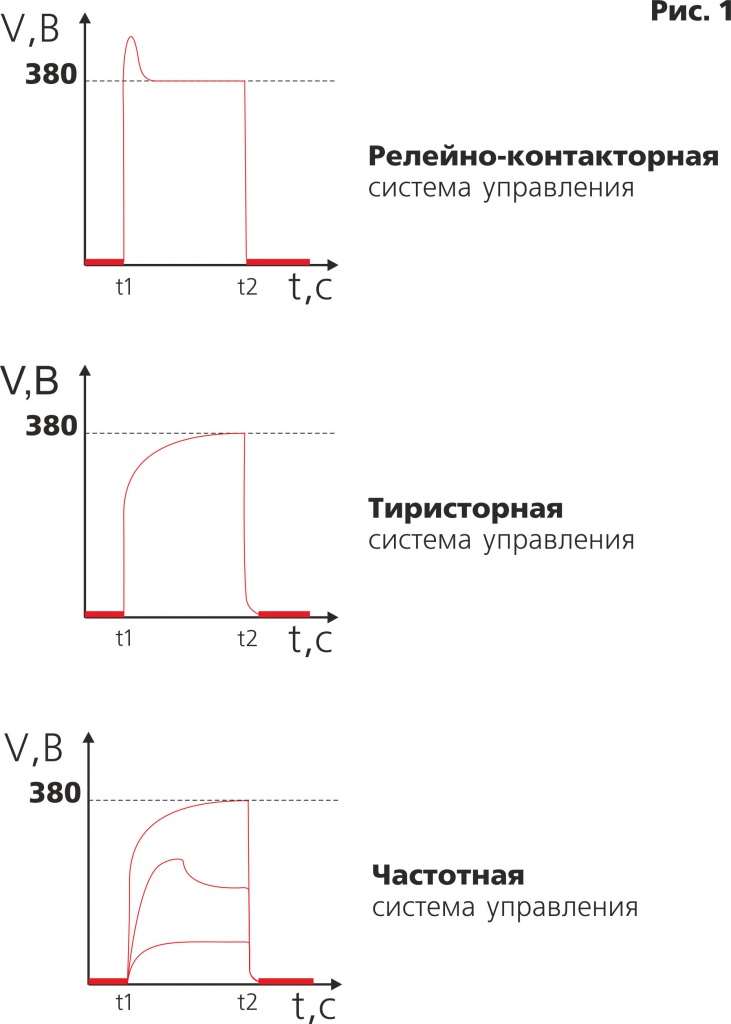
На диаграмме видно, что в момент подачи управляющего сигнала, момент торможения происходит также резко.
При тиристорной системе управления нет резкой передачи момента от механизма к механизму. В момент t1 электродвигатель плавно набирает обороты до номинальных значений. Торможение происходит плавно, без рывков.
При частотной системе управления разгон и торможение осуществляется так же плавно, как и при тиристорной системе управления. Преимущество частотной системы в том, что в процессе перемещения груза можно увеличивать и уменьшать скорость перемещения груза в пределах заданного диапазона регулирования.
Будем рассматривать и сравнивать два самых распространенных на настоящий момент способа регулирования скорости: релейно-контакторный и частотный.
Релейно-контакторная система управления появилась на рынке гораздо раньше частотной системы и несколько десятков лет была основной системой управления грузоподъемными механизмами. Релейно-контакторная система управления позволяет регулировать скорость как механизма подъема/опускания груза, так и механизма передвижения крана и передвижения тележки грузовой. Управление может быть как одноступенчатым (включил – и механизм рывком старается разогнаться до максимальной скорости), так и многоступенчатым (путем переключения многопозиционного переключателя, ступенями увеличиваем либо уменьшаем скорость подъема или перемещения).
Частотная система управления появилась на рынке заметно позднее. Основу частотной схемы управления составляет частотный преобразователь. Регулирование скорости происходит плавно, путем преобразования 3-х фазного тока частотой 50 Гц в трехфазный ток частотой 1 Гц – 87 Гц.
Преимущества частотной системы управления по сравнению с релейно-контакторной:
- экономия электроэнергии (ориентировочно на 30 %);
- снижение ударных нагрузок на механизмы, которыми управляет система управления (продление срока службы механизмов кинематической схемы ориентировочно на 50 %).Возможность регулирования скорости подъема/опускания и передвижения (точное позиционирование груза позволяет снизить время 1 цикла работы крана ориентировочно на 10 %);
- возможность удаленной диагностики привода посредством промышленной сети, либо путем определения кода ошибки на табло частотного преобразователя или на экране промышленного монитора в кабине крановщика. Такая возможность позволяет моментально диагностировать часть неисправностей и незамедлительно приступить к устранению неисправности – минуя этап выявления неисправности (сокращение времени на устранение неисправностей ориентировочно на 10 %);
- снижение акустического шума механизмов кинематической схемы (ориентировочно на 30 %);
- возможность применения системы рекуперации электроэнергии - возврат в питающую сеть электрической энергии в момент торможения (дополнительно снижаются расходы на электроэнергию для питания крана ориентировочно на 15 %). Исключение «просадки» мощности питающей сети (в момент пуска электродвигателя, управляемого релейно-контакторной системой управления, в доли секунды возникают токи, превышающие номинальные в 6-8 раз, соответственно все электроприборы, подключенные в этот момент к электросети параллельно с краном, могут испытывать нехватку электроэнергии, что может приводить к непреднамеренным выходам из строя либо к незапланированным остановкам некоторых процессов. Для исключения «просадки» мощности сеть питания подключают к специальным устройствам, называемым стабилизаторами напряжения).
Недостатки частотной системы управления по сравнению с релейно-контакторной:
1. Большинство моделей частотных преобразователей являются источником помех (это накладывает ряд ограничений на подбор оборудования, работающего в непосредственной близости от частотной системы управления);
2. Сравнительно высокая цена (в момент появления на рынке промышленных образцов частотных систем управления, построенных на базе частотных преобразователей, они были на порядок дороже релейно-контакторных аналогов, но по мере развития технологий изготовления частотных преобразователей себестоимость изготовления последних снижалась. Если еще 2 года назад частотная система управления была дороже релейно-контакторной примерно на 100 % – 150 %, то уже в 2016 г. эта разница достигает ориентировочно 50%);
3. Старение конденсаторов главной цепи.
На основе вышеизложенных аргументов можно сделать вывод, что срок окупаемости частотной системы управления в настоящее время составляет 2-3 года (еще 3 года назад срок окупаемости составлял 5-6 лет из-за высокой стоимости частотных систем управления).
 В настоящий момент для организаций, эксплуатирующих грузоподъемные механизмы, частотная система управления является наиболее выгодной!
В настоящий момент для организаций, эксплуатирующих грузоподъемные механизмы, частотная система управления является наиболее выгодной!